
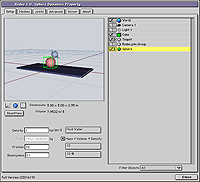
The basic setup of a Rodeo simulation is done in the setup tab. To the right there is a list with all objects that are currently available in your project. From Rodeos point of view an object can have three conditions:
• active physics controlled
• passive or user animated
• invisible
To the left we see an OpenGL preview.
Active physics controlled objects
Each object listed in Rodeos object list has a checkbox as well as a green triangle to set similar to the object flags in the Project Window of Animator. To make an object physics controlled, click the checkmark and make sure the arrow right to the checkmark is green. The checkmark means, that this object is visible for the plugin. The green triangle means that the motion of this object will be calculated by Rodeo (make sure that the object is also animatable in the project window of Animator).

You can select more than one object via
SHIFT-select and enable physics for all selected objects
with one click.
Automatic shape recognition
Rodeo will automatically detect whether the object is a box
or a sphere. If the object was successfully detected as a
box its icon changes to a green box in the list. A detected
sphere is represented by a green sphere. The physics engine
ODE has optimized internal representations for these
shapes. That is, working with an internal perfect sphere
yields better results than withe the polygonal
approximation of a sphere. Objects that are neither boxes
nor spheres are displayed as grey spheres.
Dimension
When you select a physics controlled object, the object
will get highlighted with its green bounding box in the
OpenGL preview to the left. Also the parameters shown below
the preview are updated. Object dimensions are the
dimensions of its bounding box. These dimensions have to
"make sense". Think of a similar situation in reality.
Especially think of the relation of the objects dimensions
to the height it is falling from. A dice falling from 10cm
takes a fraction of a second until it hits the ground and
reacts quite different from the equivalently big box
falling from 10m which will take some time. You are able to
change this overall scale in the Advanced tab discussed later.
Volume
If the object is closed (not necessarily welded) the
objects volume will be calculated and shown here.
Density
The density of an object determines how much mass an object
has based on its material with the formula volume * density
= mass. There are different predefined materials for your
objects to choose from the popup menu.
Mass
If the "Mass = Volume * Density" checkbox is checked, Rodeo
will automatically calculate the mass of an object
according to its volume and density. If the checkbox is not
checked you can type in the mass and the density will
change.
Friction
Surface friction determines the objects behavior when
sliding along other objects. Shiny glass will have a lower
friction as rough rubber.
Bouncyness
Bouncyness determines how much force an object will loose
when it bounces off a collision surface. A perfect bounce
does not take away any force while absorbing bounce will
take away all force as soon as an object hits another. Note
that theses setting interact between active and passive
objects. If you have a sphere that absorbs the bouncing
force it will nevertheless bounce of a collision surface if
the surface has another value than 0 for the bouncyness.
Imagine a marble sphere falling onto a surface of rubber.
The sphere absorbs all bouncing forces, while the rubber
introduces the forces again to the sphere.
It is possible to shift-select
more than one object in the list and change the properties
for all selected objects at once.
Passive and
user animated objects
Passive objects are all objects that will be
used for the calculation of collisions but not be animated
by Rodeo. They are static. Nevertheless they will also
add/subtract force to active objects based on their
friction and bouncyness settings.
A special case of passive objects are user animated
objects. As the name indicates they are animated by the
user in Animator. Their position and rotation is taken into
account when doing the physics simulation. User animated
objects are not affected by other objects in the scene.
This can cause severe forces. For example, a physics
controlled object squeezed between user controlled objects
will be likely to fly off with a great velocity suddenly.
The parameters (density, mass, friction and bouncyness) of
a passive or user animated object are set the same like for
active physics controlled objects.
Invisible
Objects
All other objects that are neither marked as
physics controlled nor passive or user animated are ignored
by the physics engine. Their checkmark is off.